Phase 1: World Generation
Building a pseudo-random dungeon generator.
Prerequisites to running the code.
Instructions: https://fa22.datastructur.es/materials/proj/proj3/#phase-1-world-generation
Solution: https://github.com/tomthestrom/cs61b/tree/master/proj3
Requirements
The world must be a 2D grid, drawn using our tile engine. The tile engine is described in lab11.
The world must be pseudorandomly generated. Pseudorandomness is discussed in lab 11.
The generated world must include distinct rooms and hallways, though it may also include outdoor spaces.
At least some rooms should be rectangular, though you may support other shapes as well.
Your world generator must be capable of generating hallways that include turns (or equivalently, straight hallways that intersect).
The world should contain a random number of rooms and hallways.
The locations of the rooms and hallways should be random.
The width and height of rooms should be random.
Hallways should have a width of 1 or 2 tiles and a random length.
Rooms and hallways must have walls that are visually distinct from floors. Walls and floors should be visually distinct from unused spaces.
Rooms and hallways should be connected, i.e. there should not be gaps in the floor between adjacent rooms or hallways.
All rooms should be reachable, i.e. there should be no rooms with no way to enter
The world should be substantially different each time, i.e. you should not have the same basic layout with easily predictable features
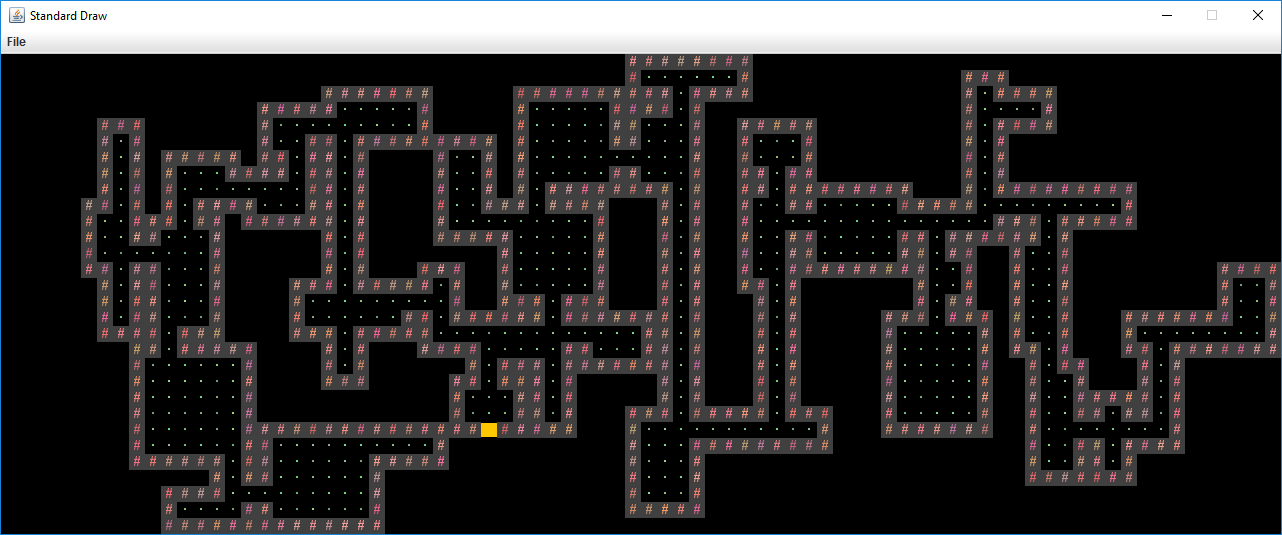
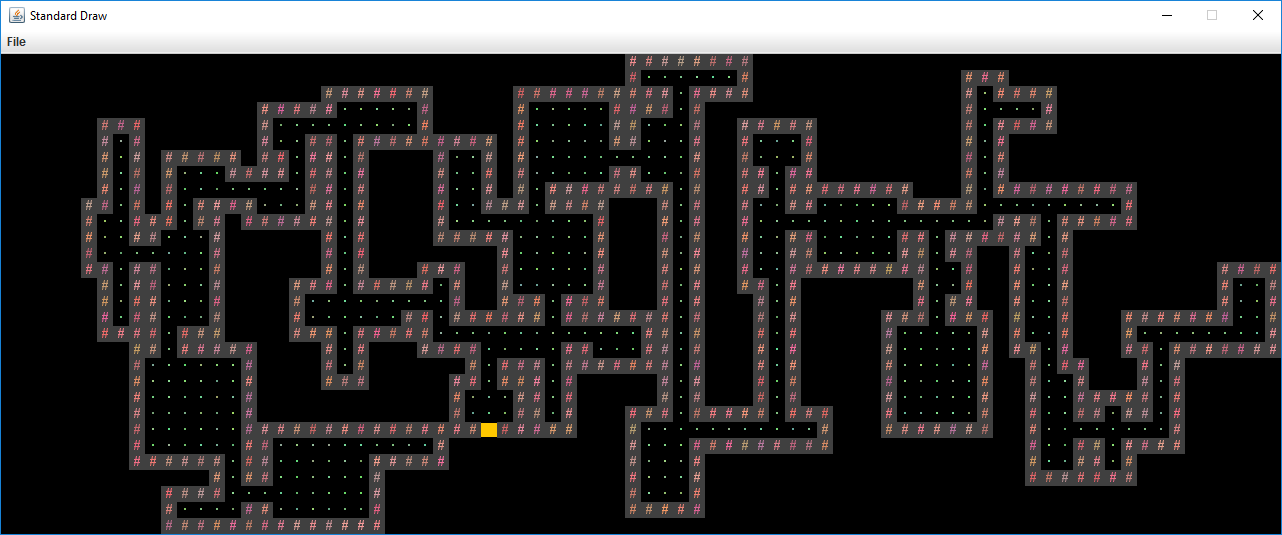
As an example of a world that meets all of these requirements (click for higher resolution), see the image below. In this image, # represents a wall tile, a dot represents a floor tile, and there is also one golden colored wall segment that represents a locked door. All unused spaces are left blank.
{kind=link}
Demo
Implementation - How To (possibly) Build Your Own Dungeon Generator
In the following paragraphs, I'll try to describe how I implemented a pseudo-random map generator that would generate a randomly different map for each unique integer seed (while always generating the same map for the same seed).
After doing some research, I decided to go down the route of using a BSP Treeto divide the space on the 2D grid (the World). By using binary space partitioning, I ensured that the future rooms wouldn't overlap. My goal was to deal with creating the rooms first and connecting them later.

I named the class that dealt with binary space partitioning accordingly - BSPTree (code on GitHub).
BSPTree class - description
BSPTree class - descriptionits basic building block is a
Node,which is its nested class.The
Nodeis being recursively split and its leaves are the basis for creating theRoomsafter the splitting is done.privatepropertyroot(the topmostNode) gets initialized in theBSPTreeconstructorwith the given gridwidthandheight -as such, the root represents the whole grid, while it's future nodes will represent it's subparts and its leaves will get turned intoRooms.privatepropertyrandom(of typeRandom) gets initialized in the constructor with the seedprivate static intpropertiesMIN_TIMES_TO_SPLITandMAX_TIMES_TO_SPLIT- denoting, as the name suggests, the lower and upper bounds of the number of times the grid is split / the depth of the recursion. These props are used along with the seed to generate a pseudorandom number of times the grid is split to ensure that maps have a varying number of rooms.publicBSPTreemethodgenerateTree- this is were the splitting/recursion happens.public List<Room>methodgetRoomsFromLeaves- collects the leaves of theBSPTree,turns each one into aRoomand returns a list ofRoominstances.
BSPTree - generateTree() - How Does it Work?
Workflow:
Randomly determine whether the 1st split (on the root) is in the vertical/horizontal direction and get the (random) x/y coordinate of the split point.
Do the first split.
Initialize a max heap (Max PQ). The max heap ensures that the
Nodesare sorted according to their size (the first element is the largest one).Insert the two split
Nodes(subgrids) into the max heap.Loop random number of times (lower/upper bounds:
MIN_TIMES_TO_SPLIT&MAX_TIMES_TO_SPLIT):Get the largest
Nodefrom the max heap.Get split direction - if it's height is < width, it will be split vertically, otherwise horizontally - ensures rooms are more "properly/proportionally" sized
Get a random split point (in vertical/horizontal direction) (within certain bounds of max/min
Nodewidth/height) to ensure future rooms are not too small).Split
Now the result of splitting is that we have 2 new
Nodes(subgrids)Insert the 2 new
Nodesinto the max heapincrement the counter for number of times split
Run the loop again, if conditions are met (split depth not reached yet)
BSPTree - getRoomsFromLeaves() - How do we turn Nodes into Rooms?
Collect the leaf
NodesGenerate Rooms of random size within the
xMin, xMax, yMin, yMaxbounds of each leaf.Return
List<Room>
PS. I think it would be cleaner to do this in another class. Originally, I wanted to have a method return the leaves of the tree (as a List of AbstractGridObject (code on Github), since each Node is also an AbstractGridObject) and then turn them into Rooms in a separate class, but left it like this because of time constraints.
After generating the Rooms, I paint them on the grid using class GridDrawer (code on GitHub).
Connecting The Rooms
This turned out to be the most challenging part. Connecting instances of Room(code on GitHub) presents 2 different problems:
The connecting logic was implemented in class RoomConnector (code on GitHub).
This class has 3 instance properties
TETile[][] worldGridrepresenting the state of the grid after painting theRoomsList<Room> disconnectedRooms- theListof theRoomsreturned via theBSPTreeMinPQ<GridSearchable> distTo- holds instances of RoomsRoomimplements theGridSearchable Interface(code on GitHub). Sorting rules are defined inGridSearchableDistanceComparator(code on GitHub)
The connecting logic is implemented in
connectmethod.
To calculate the distance between 2 points, I used the formula for euclidean distance implemented in GridMathUtils class (code on GitHub).
Choosing which Rooms will be connected with each other
Naturally, we want to connect Rooms that are the closest to each other to ensure our corridors are not cutting through another Room in between.
If we imagine that each Room is a node (vertex) in a graph, connecting them via the shortest path sounds like building an MST (Minimum Spanning Tree).
My method of determining which 2 Rooms to connect is very similar to how Prim's algorithm works.
Prim's Algorithm for building an MST
start from some arbitrary node - the "source" (in the beginning the only node in the Tree)
insert all other nodes into a Priority Queue in order of distance from the Tree
Remove the closest node from the PQ - connect it to the Tree
Recalculate the distance of the nodes in the PQ from the Tree using the newly added node
Repeat from step 3. until no nodes in PQ
Prim's Inspired Room Connecting
As the source, pick the 0th element of the
List<Room> disconnectedRoomsinstance propertyPopulate
MinPQ<GridSearchable> distToinstance property with the rest of theRooms- using euclidean distance to determine proximity to the sourcePick the first element (the closest one in the PQ)
After connecting the 2
Rooms, I recalculate the distance to the rest of theRoomsin thedistTo MinPQfrom the newly added Room.Repeat, starting from step 3, until there are no
Roomsleft in thedistToMinPQ.
Finding a path and connecting Rooms with a corridor
A path on a 2D grid is basically a sequence of (x,y) coordinates, these are for the most part represented by GridCoords (code on GitHub). To reflect this, I implemented the PathFinder class (code on GitHub) as an Iterable that provides an Iterator for sequential access to the coordinates (so they can be requested/accessed one at a time).
The PathFinder:
The heuristic in this case was the aforementioned euclidean distance, where the
PathFindercalculates the next coordinate based on it's closest proximity to the targetwhen
publicminimizeZigZagmethod is called, thePathFinderwill intend to provide the nextcoordinatesin the sameDirection(code on GitHub) as the previous one - this is useful to have nice straight corridors/hallways with proper corners (no zig-zag)
First we need a door
To build a corridor between 2 rooms, we need a starting point.
The starting point is a door.
Turns out that in order to find a door, we need a path finding algorithm too!
PathFinder comes to the rescue:
the source is the center of the
Roomthe target is the center of the
Roomwe will try to connect to (this is just to provide the heuristic forPathFinder)one simple constraint - the door cannot be on the edge of the
Roomafter we hit the first wall tile of our Room, we have a door
after finding the door in the source
Room, we do the same for the targetRoomset the target of the target
Roomto be the door of the sourceRoom,so thatPathFindersearches in that general directionafter finding the door of the target
Room, set the target of the sourceRoomto be the newly found door of the targetRoom
After we have a door, we want a corridor
We run PathFinder again - this time with minimizeZigZag.
An important property of a corridor is that in addition to being a sequence of x,y coordinates, when painted, it's also a sequence of a set of tiles - each floor tile must be surrounded by wall tiles.
For this reason, we need to be able to combine each coordinate with the proper set of tiles. When I started thinking about this, I realized that there were actually 10 possible types of sets of corridor tiles and the needed type can be determined by combining the direction of the last 2 moves.
So now it sounds like we need to store GridCoords and their Direction, that's what I implemented GridCoorsDirection for (code on GitHub).
If Direction 1 is UP and Direction 2 is LEFT, I will need TopToLeft (code on GitHub) a corner tile that will eventually be painted like this:
Similarly, there are 9 other types of CorridorTile (folder on GitHub)
For this reason PathFinder is implemented such that in addition to providing the coordinates vianext, it's also able to return the direction of the move via getLastMove (I admit it's a bad name), we save this combination into a List<GridCoordsDirection> directionsTaken.
Upon reaching the target door, we provide directionsTaken to the build method of Corridor class (an ArrayList of CorridorTile) (code on GitHub) which builds itself picking the suitable CorridorTile for each entry in directionsTaken using CorridorTilePicker (code on GitHub).
FInally, after going over the cycle of picking 2 Rooms to connect, finding their doors and building a list of CorridorTiles for each Corridor until there are no more Rooms in the distTo PQ to connect, we iterate over all the Corridors and paint them using GridDrawer.drawCorridor.
Summary
Uff, that was a mouthful to read!
I really enjoyed working on this project and I feel like I learned a lot.
However, I have a couple of remarks:
Within the course at UC Berkeley the students do this as a group project, so they get immediate feedback on their ideas and are able to improve upon them fast. That's the part I felt I was lacking, getting feedback is the best way to progress fast.
In hindsight, writing these lines 3 months after finishing this project, I think the whole Corridor Tile picking & building thing is unnecessarily complicated. At the time I was too deep in the tunnel to recognize it. It actually fails to build a perfectly connecting corridor in some cases.
I haven't managed to find the bug, sometimes it cuts strangely into a room it's supposed to connect to. I "fixed" this by writing a mapPostProcessor method in GridDrawer, to get a working implementation and not waste more time on trying to build the perfectly connecting corridor.
I'd like to clean up the code one day too!
Last updated